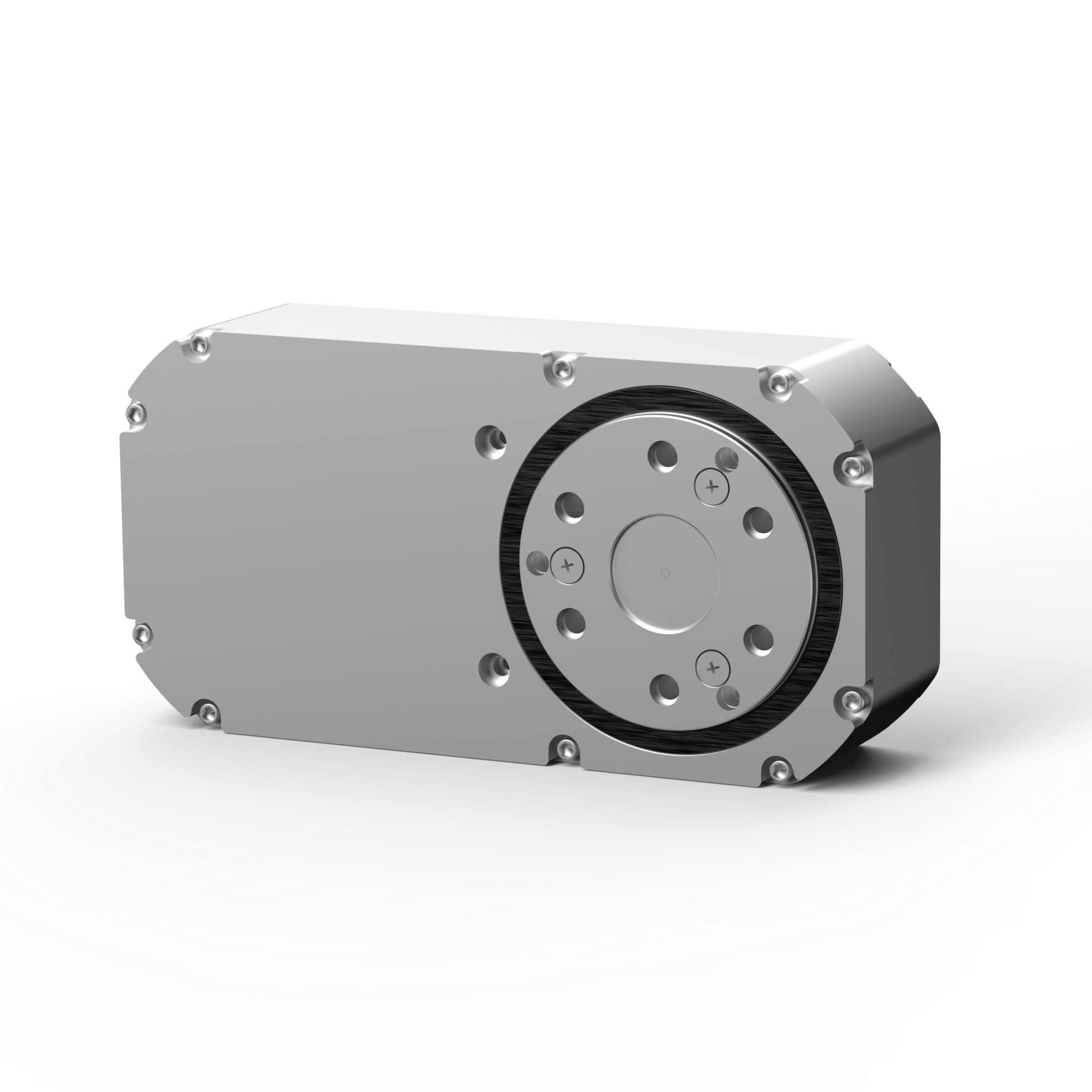
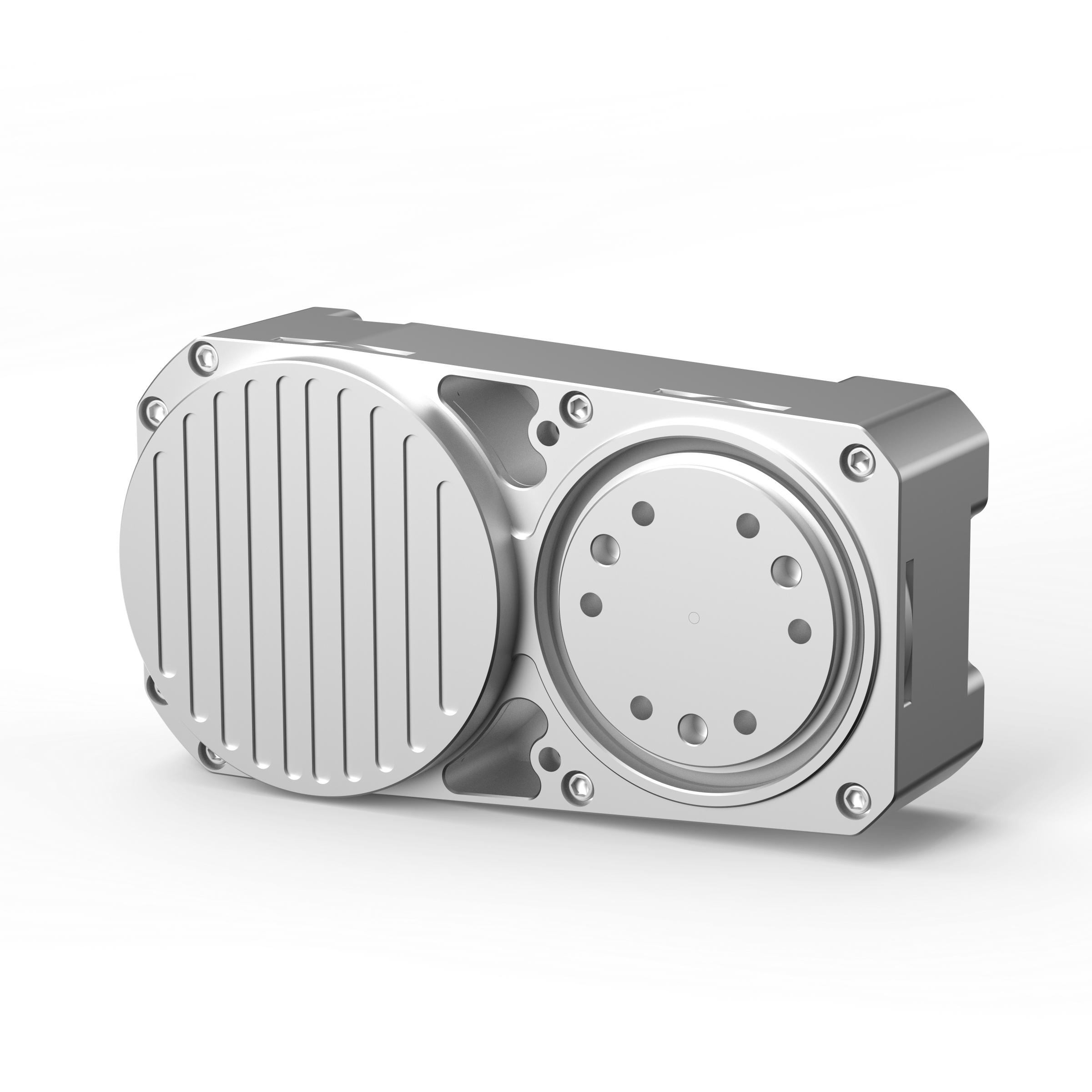
The HTPU series joint modules are mainly composed of a reducer consisting of side-by-side gears and a planetary gear set, as well as a self-designed brushless DC motor.They feature low backlash torque, low torque ripple, and dual absolute encoders, supporting current or torque control.They are widely used in exoskeleton design, wearable devices, small humanoid robots, robotic arms and other fields.Their unique flat design provides more options for transmission in various space-constrained scenarios.
- Flat design
- Extra-large torque
- Ultra-high precision
- Dual encoders
-
HTPU-7033-04-CNE
| Length | Width | Height | Weight | Reduction ratio |
| 140.5mm | 71.5mm | 36.9mm | 808g | 33 |
| Rated torque | Locked rotor torque | Rated RPM | No load RPM | Rated Output Power |
| 20Nm | 50Nm | 40rpm | 48rpm | 84W |
-
HTPU-6035-04-CNE
| Length | Width | Height | Weight | Reduction ratio |
| 115mm | 61.9mm | 37mm | 558g | 35 |
| Rated torque | Locked | Rated RPM | No load RPM | Rated Output Power |
| 10Nm | rotor torque-36Nm | 50rpm | 60rpm | 52W |
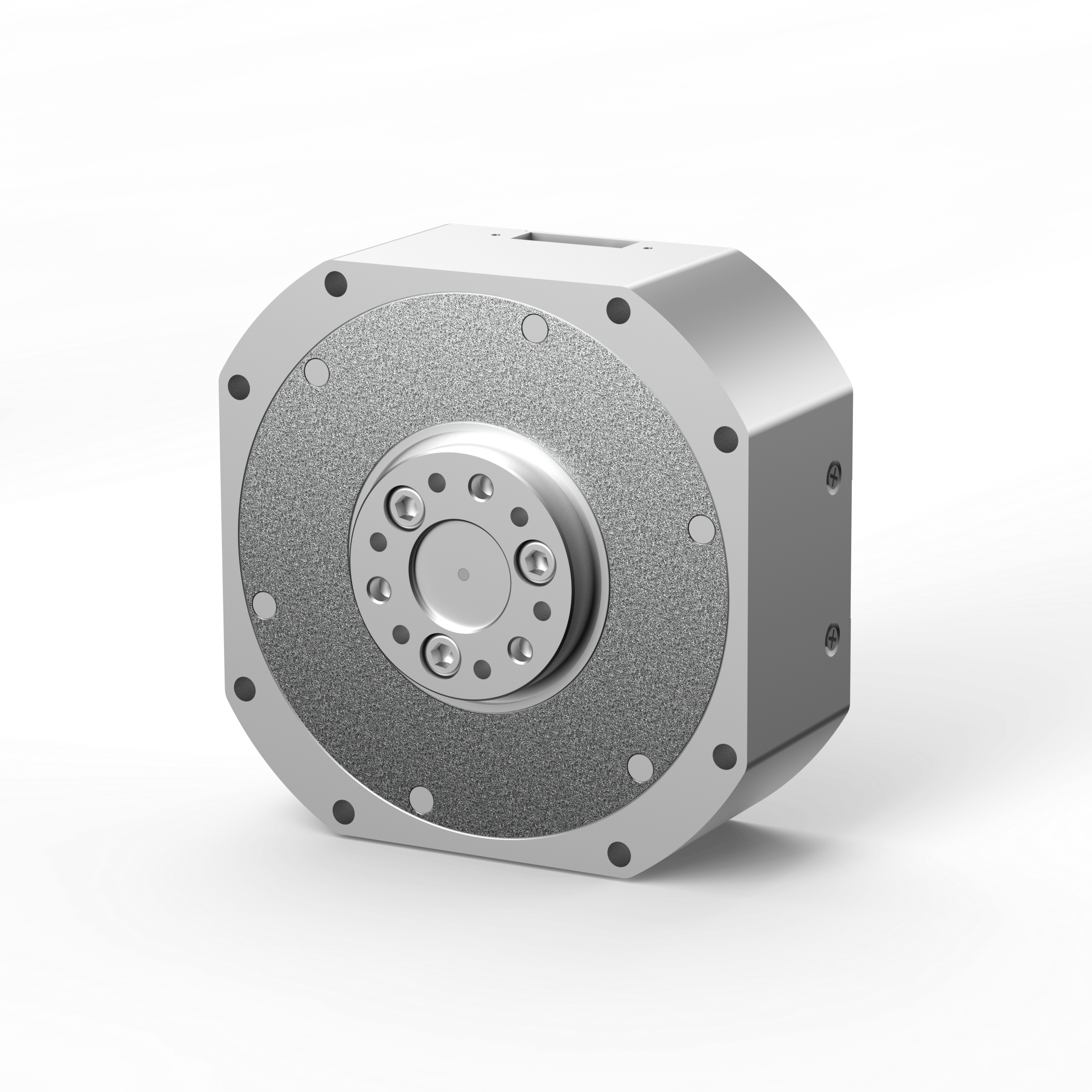
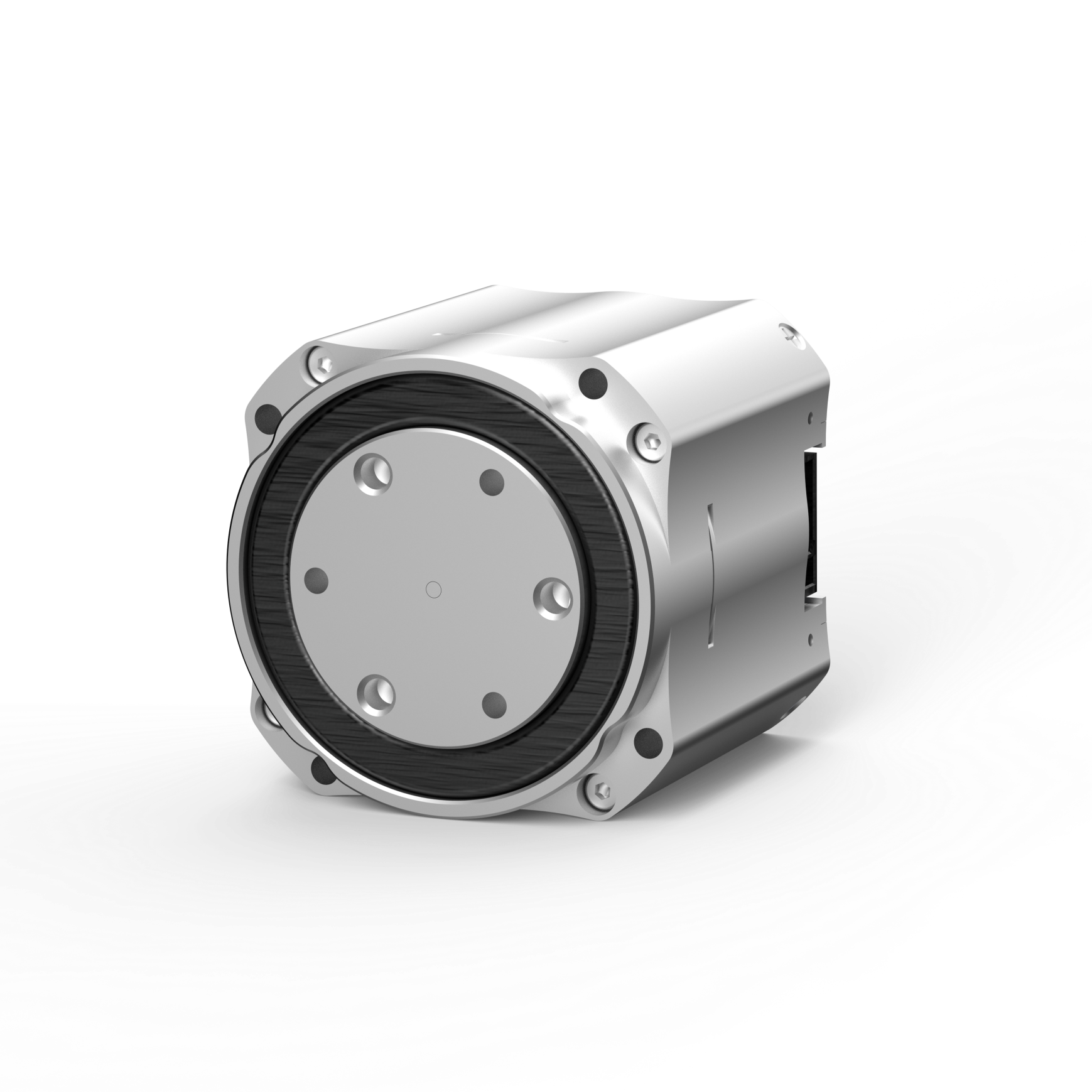
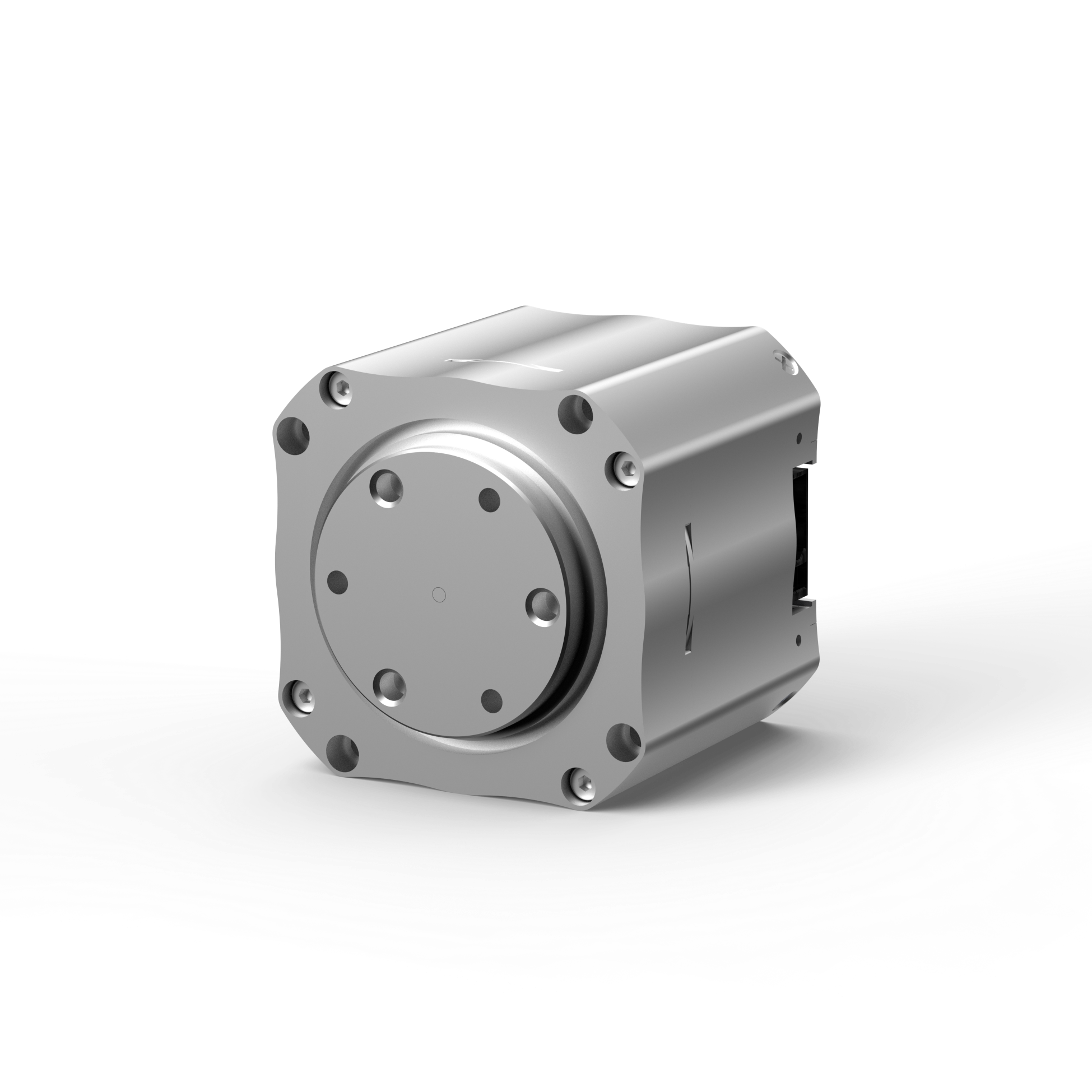
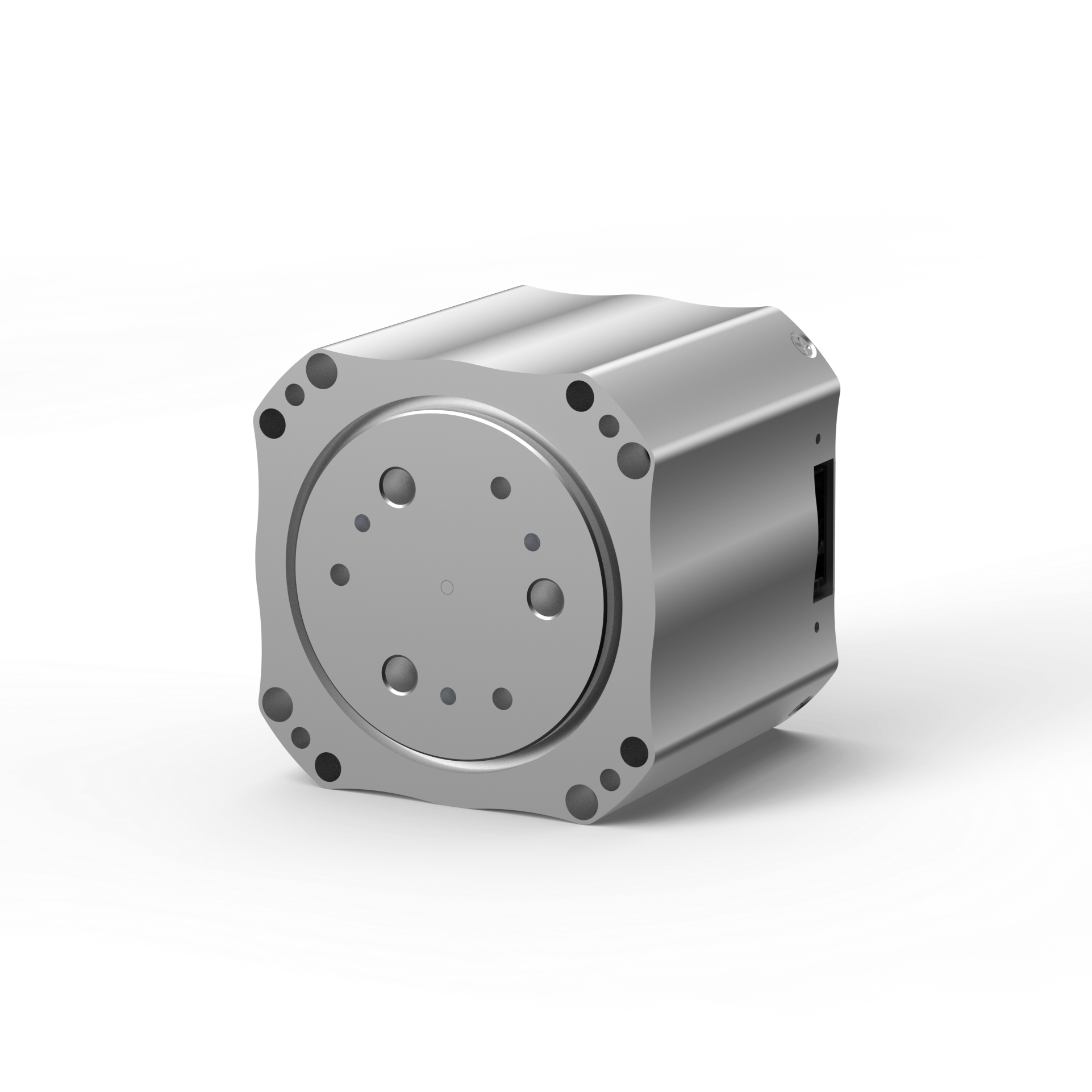
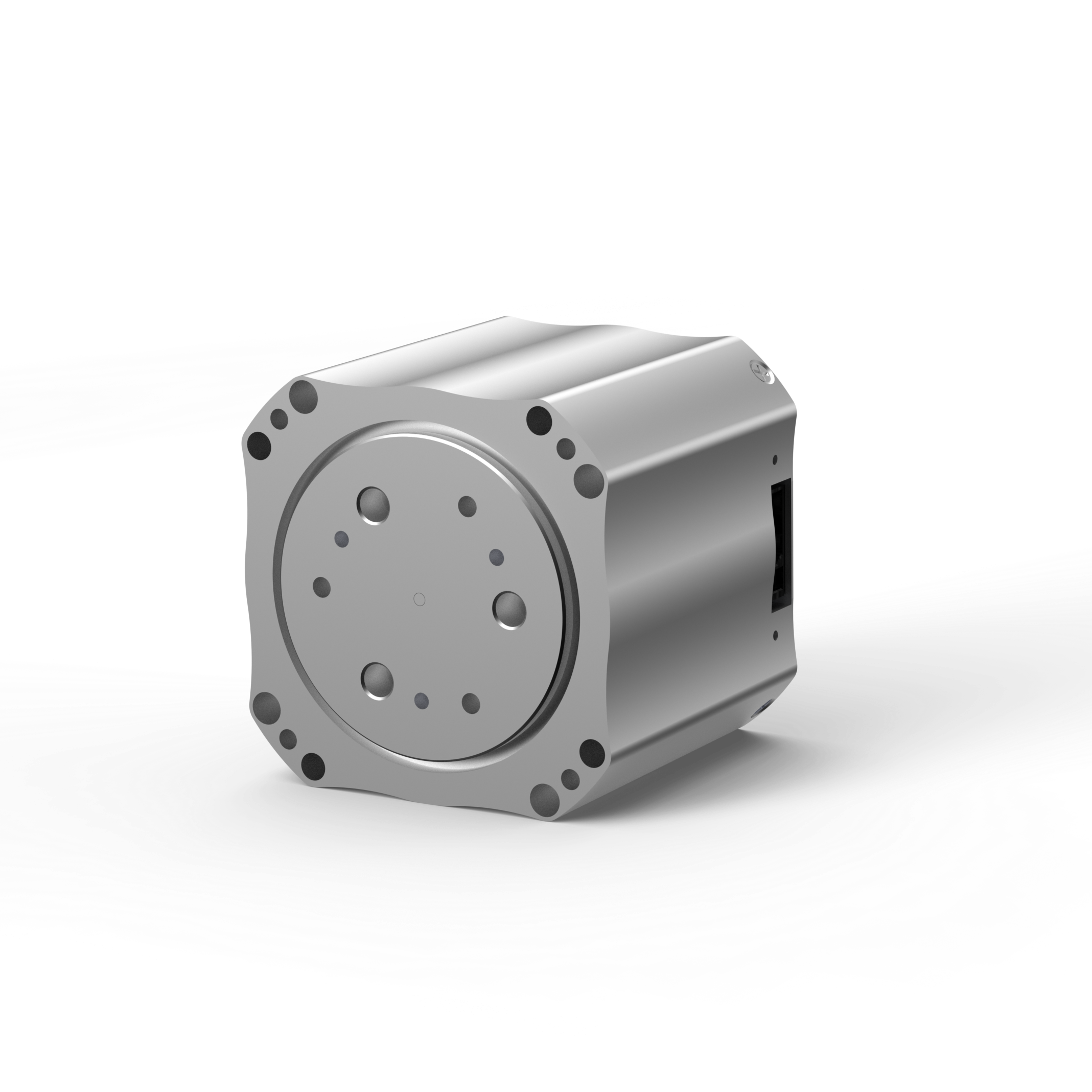
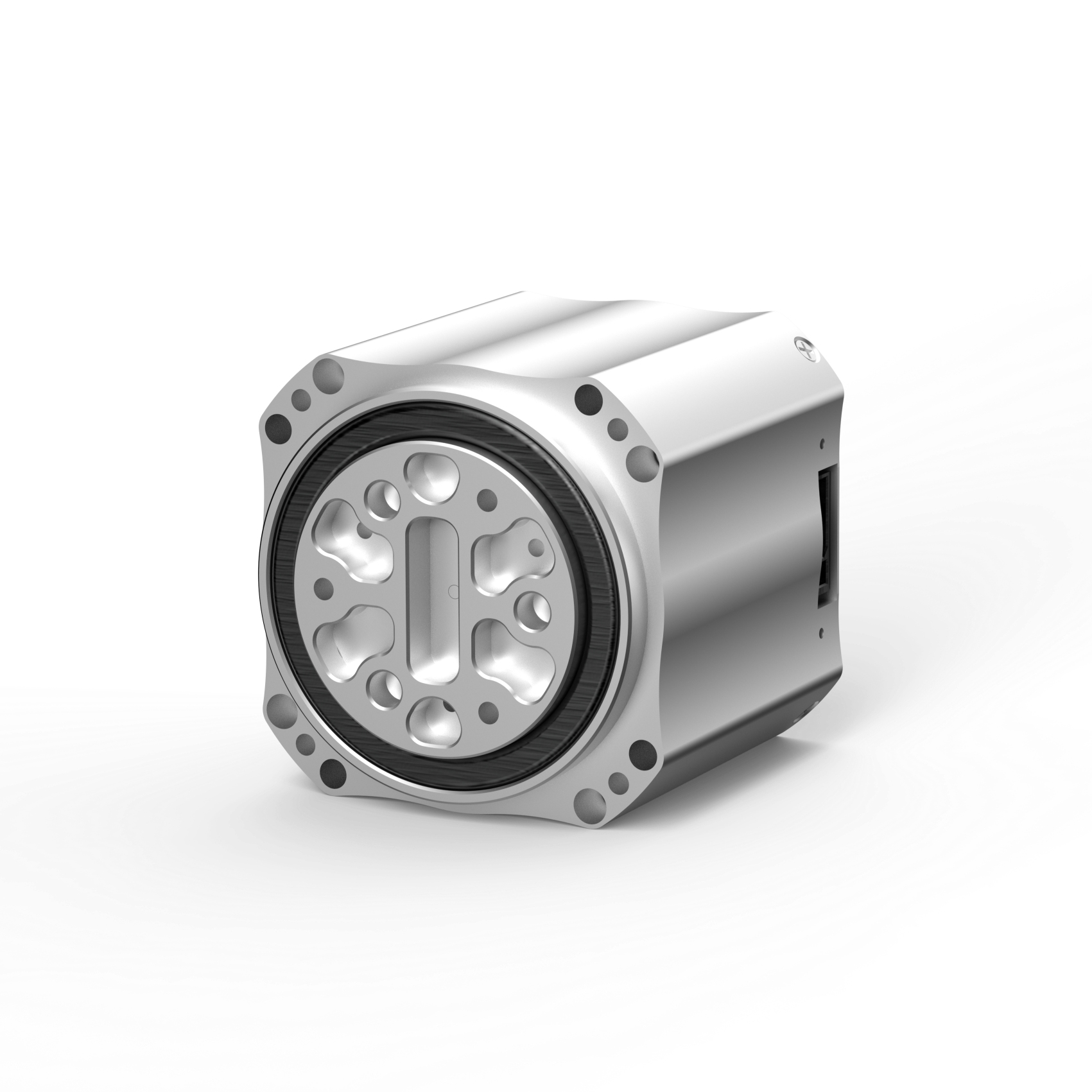
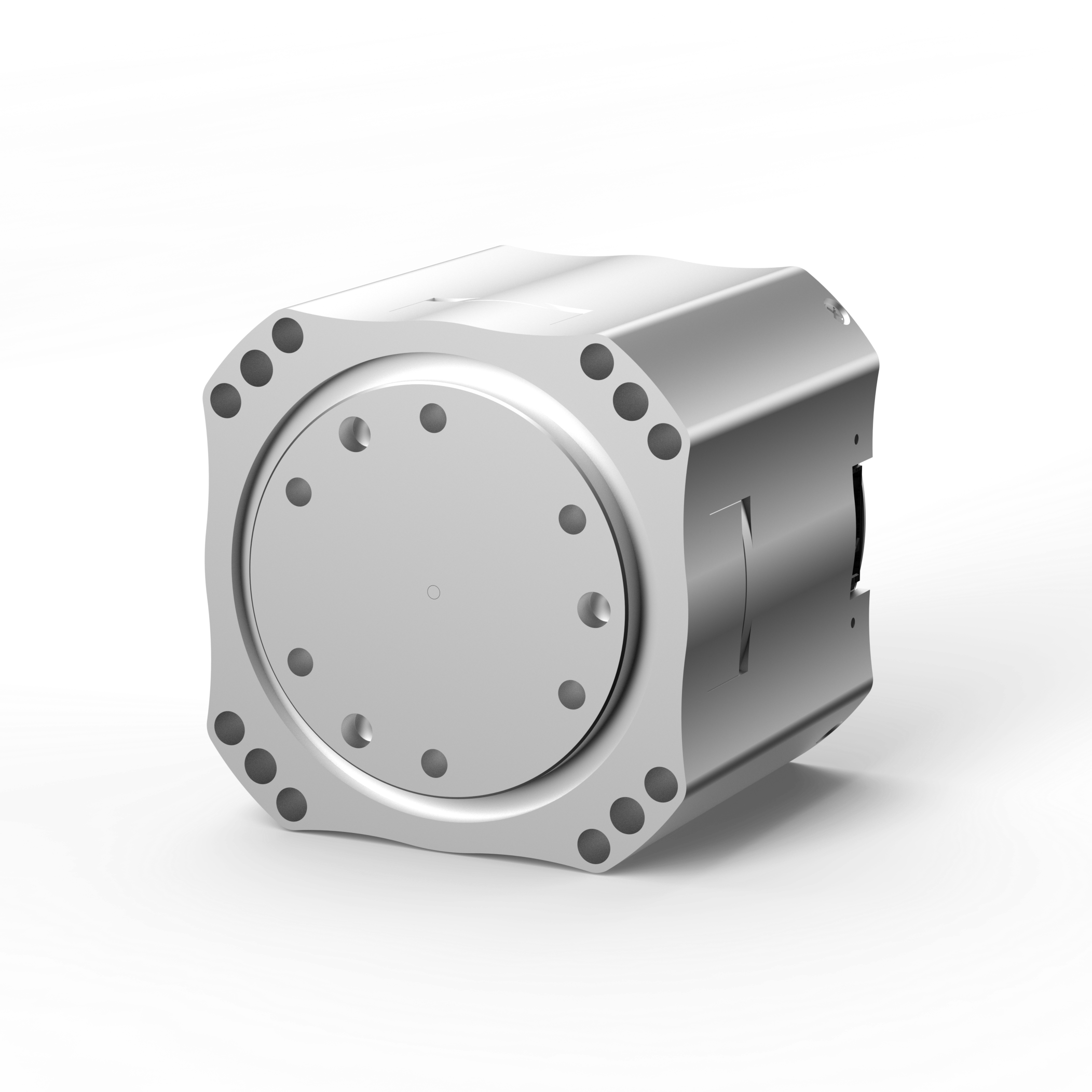
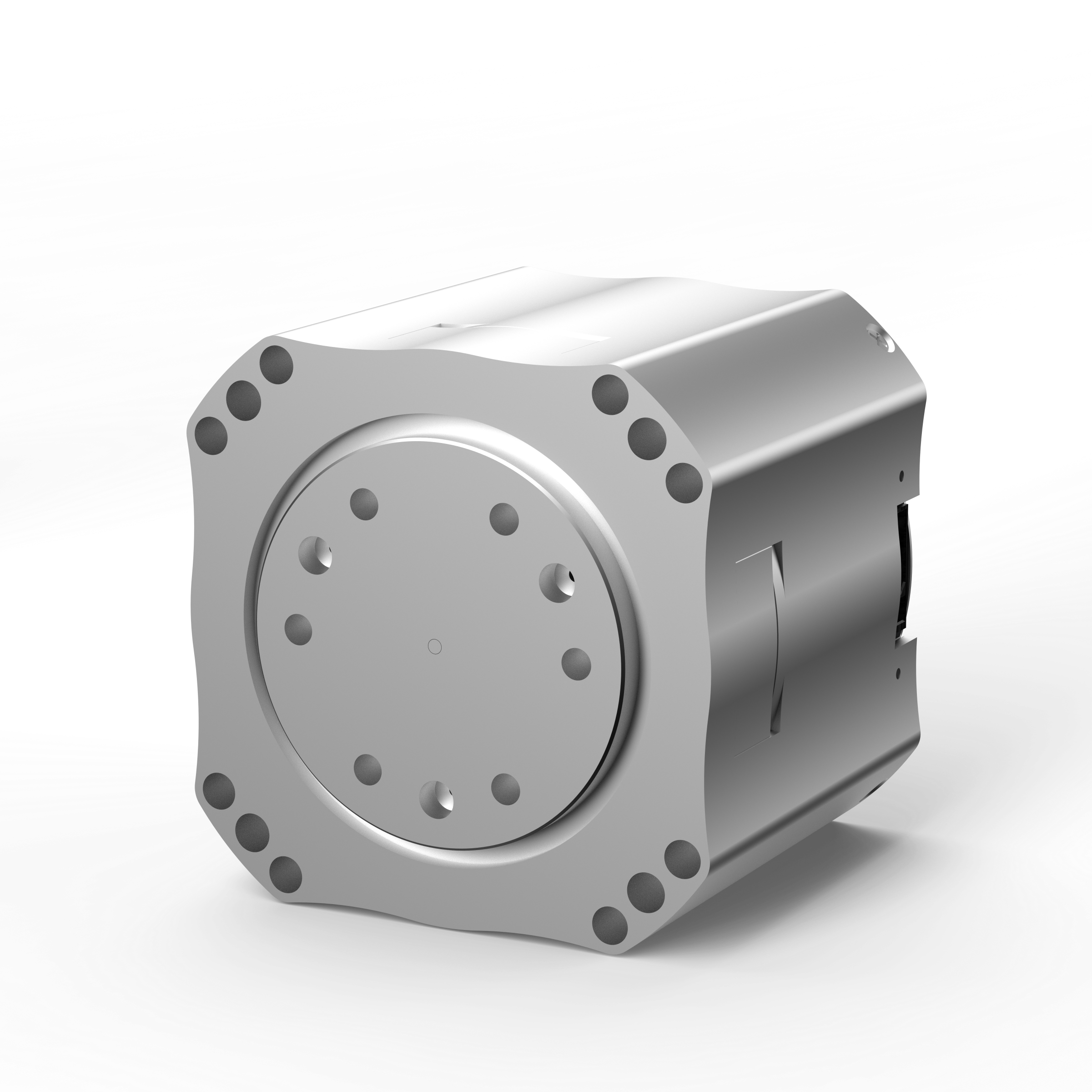
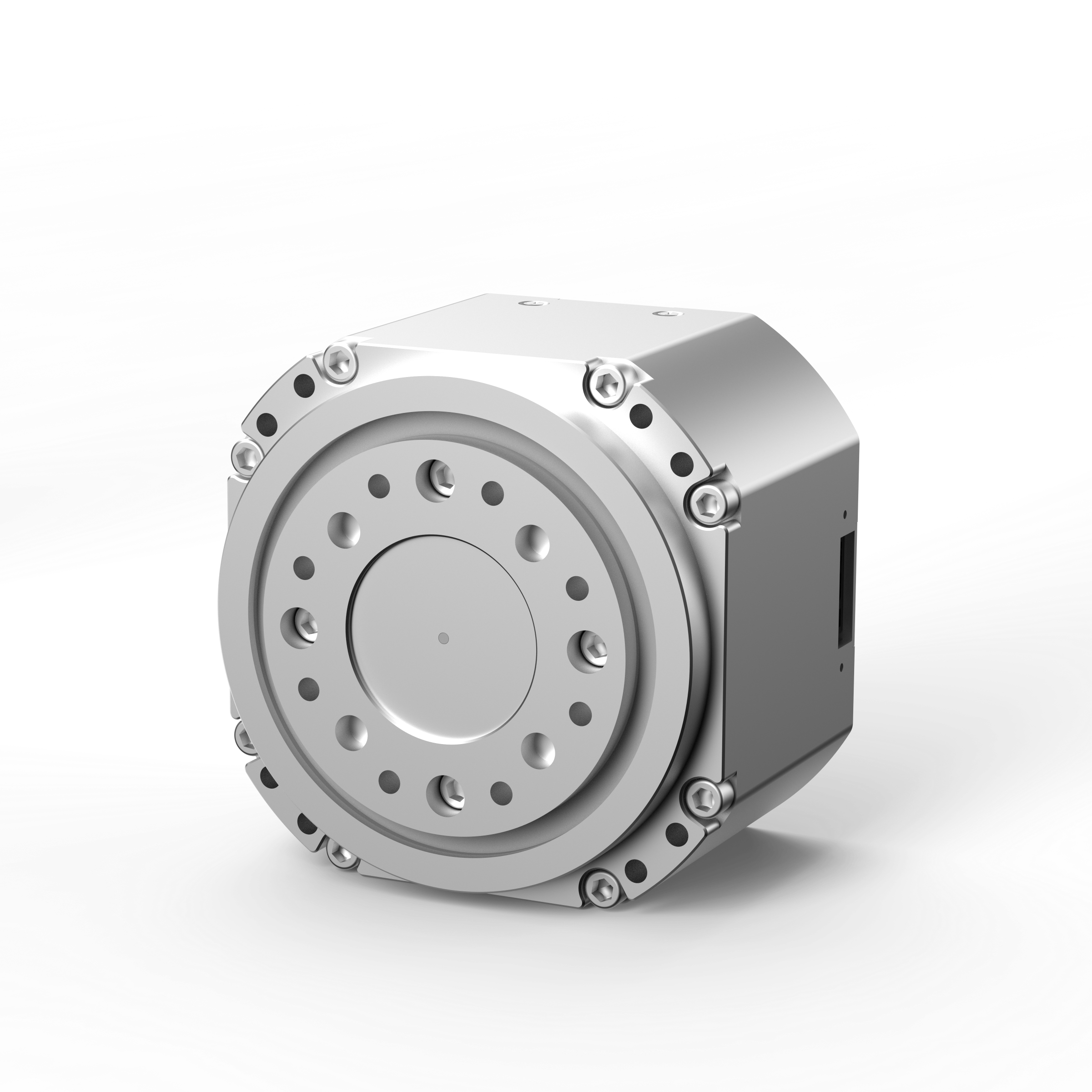
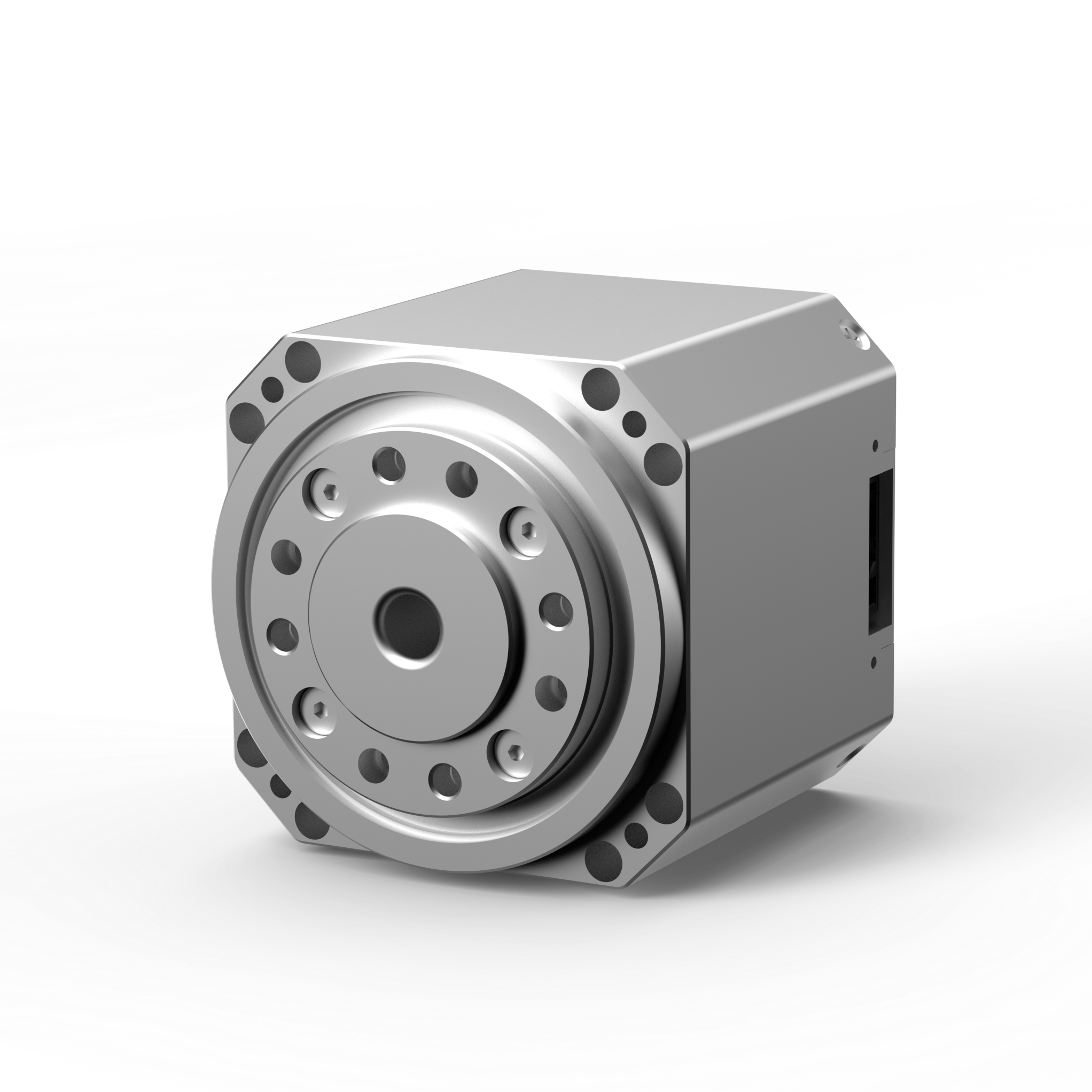
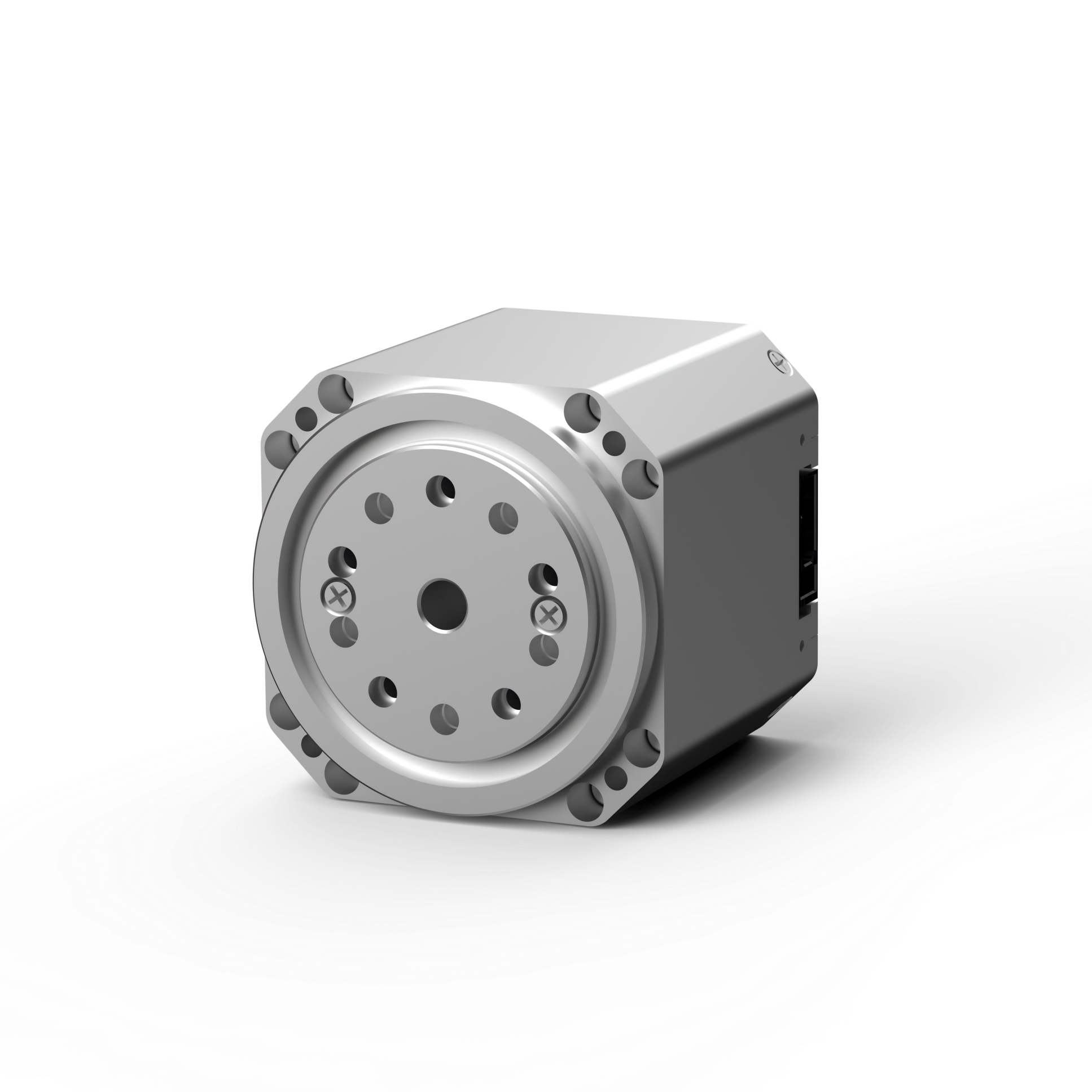
The HTCP series and HTCW series cycloidal hollow joint modules are mainly composed of an optimized cycloidal pinwheel reducer and a self-designed brushless DC motor.They feature low backlash torque, low torque ripple, and dual absolute encoders, supporting current or torque control.These modules are widely used in automation equipment, robotics, aerospace, and other fields.The hollow design facilitates cable routing, making them particularly suitable for space-constrained scenarios that require precise power distribution.
- Optimized cycloidal drive
- Low backlash & torque ripple
- Dual absolute encoders
- Hollow, space‑saving design
-
HTCP-5031-06-CYC
| Length&width | Height | Weight | Reduction ratio | Rated torque |
| 50mm | 53mm | 385g | 31 | 4Nm |
-
HTCP-4531-06-CYC
| Length&width | Height | Weight | Reduction ratio | Rated torque |
| 44mm | 44.9mm | 237g | 31 | 2Nm |

-%E6%A0%87%E6%B3%A8%E7%89%88E.png)