
我们是从2020年8月开始做机器人的。那时候没有成立公司,我连做机器人需要的技术和分工都搞不清楚。
但当时我有个判断,国内有不少人在做机器狗,甚至个人都能做出来了,比如舵狗王和灯哥。我感觉做机器人的技术应该是成熟了,就想着可以做机器人了,而且应该做人形机器人。
这里要感谢灯哥,我找他来合作一个轮足产品,他欣然接受。一个人在小屋肝了两个月,做出了第一个舵机轮足。
(https://www.bilibili.com/video/BV1B3411t7eJ/)
这次合作也让我了解到基础的技术岗位有机械、硬件、嵌入式和运控。舵机性能太差,我想自己做无刷模组,灯哥觉得这事太难,后来他出国留学,我继续研究。事实证明我低估了这件事的难度。
我之前是做程序化广告的,跟机器人毫不相干,所以经常有人问我为什么要做人形机器人,以及你凭什么能做。
做机器人是基于对智能进化的思考,对社会发展的判断,以及对机器人总体技术的推理。但要讲明白不那么容易,我是个外行,也不是什么大咖,说了不让人信服,还容易留下不靠谱的印象。所以我不怎么跟别人说,被问了就说:兴趣爱好,做着玩。等做出来了,大家自然也就信了。
现在,我们自己的产品做出来了,要推向市场,另外也需要招募更多的优秀人才,所以我觉得有必要讲一下,让用户和潜在的候选人对我们公司和产品作出正确的判断。
自从马斯克做了人形机器人,人形机器人这个赛道就火起来了,大家也逐渐接受了,也就不必多说了。
但人形机器人从探索到商业化的过程可能会比想象中困难还有很长的路要走。
硬件看起来能走了,但实际上,硬件的稳定性、耐用性、合理性都还有很多问题;软件方面问题就更多,感知、决策、运动技术都还远达不到理想的水平,应用尚且困难,通用性更无法满足。
这有点像电脑发展的早期阶段,硬件有了,没软件,没法民用和商用。当PC出现后,成本降下来,让大量开发者参与进来,才有了操作系统、办公软件、娱乐软件…...然后电脑才能得到广泛应用。
所以我认为当前的人形机器人行业,就像当年的PC行业,需要先为开发者提供高性价比的便于开发的平台,充分释放开发生产力,才能快速推动整个行业的发展。然后才会有各种应用的机器人走进工厂和家庭。
为此,我们就去研发小型的机器人,最大程度的在时间和空间上解放开发,同时又保证性能不减配。
2021年的时候不像现在,我找遍了全网都找不到合适的模组,最后只能自己研发,因为没有参考也没有经验,所有的问题都需要自己思考自己探索。
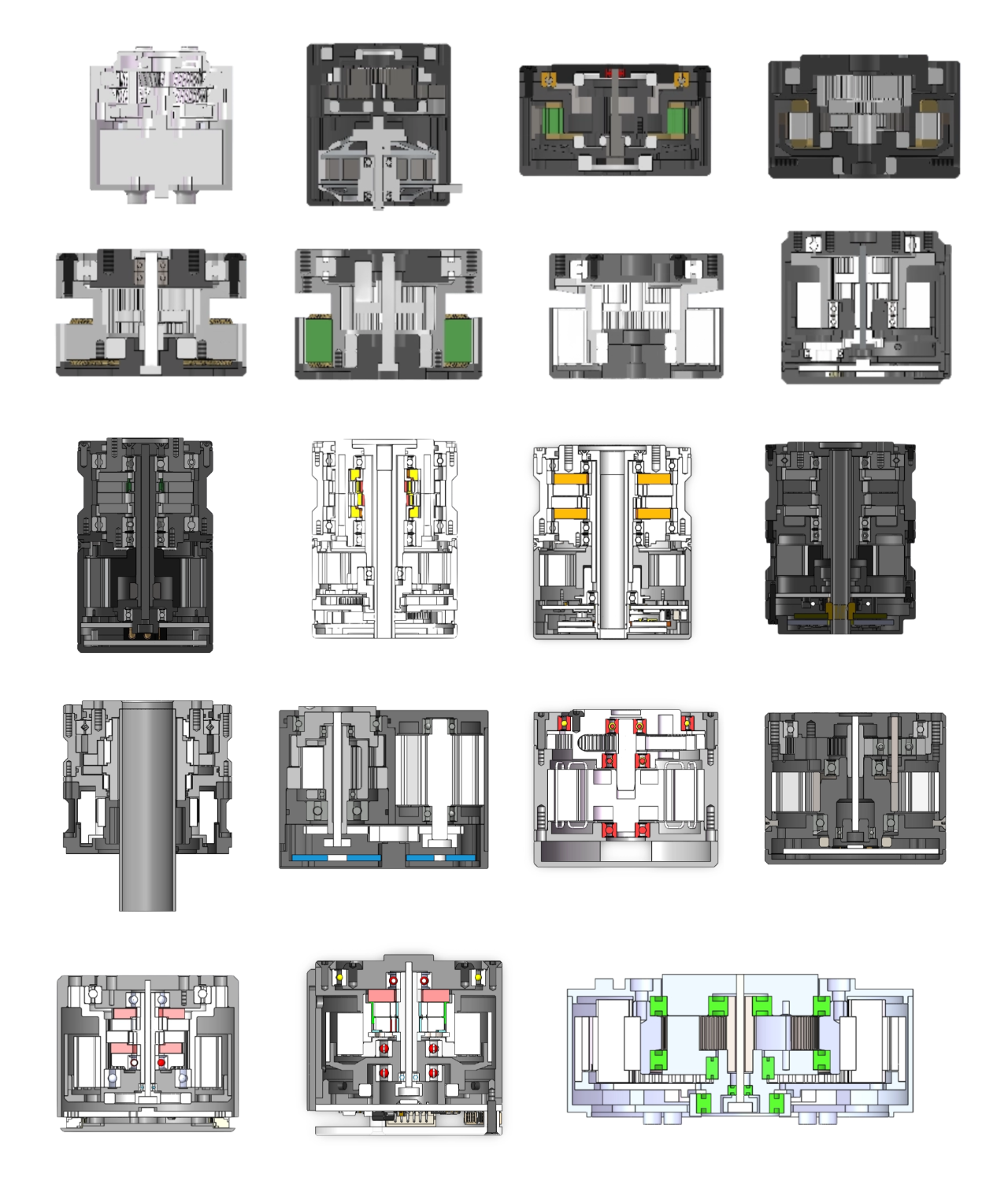
我们研究了几乎所有的减速机和电机形态,包括行星、3k、摆线,谐波,滚柱丝杠,内外转子,轴向磁通,直线电机,哈尔贝赫。自己做减速机,电机,电机驱动,扭矩传感器,扭矩测试台。
从经营角度看,我的很多做法并不明智,总想作出突破,总想把产品做到极致,极度厌恶抄袭,当年做程序化广告是这样,现在做机器人还是,因此走了不少弯路。
为了搞懂技术,我看了YouTube上能看的几乎所有相关的视频,从减速机到本体结构,从电机到液压,从生物结构到运动规律,从运动控制到感知规划;为了验证各种奇思妙想,建了工厂,各种材料,各种工艺,研究了个遍。
为了做出好的机器人本体,我们研究了各种关节结构,串联的、并联的,直连的、远端的,SEA、PEA,泵驱、阀控、静压传动、绳驱甚至软轴驱动。
我们做了不下10款不同结构的机器人:

小型机器人也设计了至少4款:

不知道有没有公司和组织研究的比我们更多。我们本来可以更快的做出产品,但因为做了很多科研工作,很多都没法转化成商业价值。
这很大程度上是我对科研的兴趣使然,但从本质上来看,商业是认知和能力的变现,只有保证认知和能力超越他人,才会有竞争力,技术含量高的项目更是如此。
过去的创业经历,也证明了这一点,程序化广告公司经历过类似的过程,10多年前白手起家,处于行业微不足道的弱势地位,经历了各种困难,但现在我们在多个板块位列第一。
现在看来,那些为科研所做的投入,最后变成了认知和能力,让我们在困难和竞争激烈的环境中更游刃有余。
机器人方面,我们从刚开始一无所知,到现在对伺服电机、减速机有了全面的研发能力和深刻的理解,并且做出了领先的模组产品;对本体结构特别是关节结构有了全面的理解,所以可以很轻松的判断各种结构的优缺点,灵活运用,驾轻就熟。这是我们一直以来在科研上的投入和积累的结果。
在对各种本体结构实践之后,我们发现实际上串联结构最适合当下开发需求,因为大多数的仿真环境和算法都不支持并联结构,只要电机足够好,串联结构非常好用。所以我们面向开发者的这一版量产机器人是12自由度串联腿部结构。
对于开发者来说,更重要的是开发和调试的便捷、通信频率足够高足够稳定,SDK接口足够好用,电机性能和稳定性足够好,电池足够安全。
在产品化这条路上,我们花了一年多时间,迭代了4个大版本,10多个小版本,最终做出我们自己比较满意的版本。

为了做出尽量轻巧的机器人,我们投入大量精力研发合适的模组。
机器人在行走过程中,腿部电机和结构都受到持续的冲击,双足比四足更严重,所以对于电机和结构的抗冲击性能有非常高的要求,为此我们对电机进行了数十轮优化,损坏的机器人和电机不计其数!


刚开始的时候各种飞线,板子挂在外面,经常断连或者烧坏元器件。现在全部做了整理,走线非常规整,接口全都整理到背板上。

传统控制需要比较高的控制频率,人形机器人会有超过20个电机,如果通信做的不好,维护和开发会非常麻烦!
我们选择canfd,同时兼顾成本、易用性和高频高带宽。我们的SDK兼容mit协议,一条指令可控制6电机。1个can口可以控制10个电机达到1000Hz频率,20个电机500Hz通信频率。充分满足了人形机器人的控制要求,同时非常易用易维护。
机器人做出高动态动作,需要高功率电池,早期用格氏电池,经常过充过放,还发生过多次电池起火的事故!


现在我们做了带BMS控制的电池,方便又安全。

另外为了方便开发者,我们开源了多套主流算法,操作系统上做好了开发部署的环境,内置了我们调试好的算法,尽量做到了开箱即用,快速开发。
附上开源链接:
https://github.com/HighTorque-Robotics/livelybot_control
https://github.com/HighTorque-Robotics/livelybot_dynamic_control
对于需要视觉的开发者,我们提供了Orin+realsense的版本。
外观上,我们做了必要的模块化设计和整体封装,但并没有做太多设计,漂亮和实用之间,我们优先选择实用,轻量化和易于调试对开发者来说是更重要的事情。
价格方面,为了让每个人都能买得起,虽然我们投入巨大,最终我们把双足套件价格定在1.68万。这应该是目前市场上最完善的双足和人形开发平台,也是性价比最高的平台。
另外,机器人创业过程中认识了很多优秀的人,不管是创业的、打工的还是读书的,真正让我感受到中国优秀人才的旺盛活力和强大力量。相信中国的人形机器人产业必将引领全球的发展。
如马斯克所说,人形机器人未来的市场空间非常庞大,机器人的应用场景和领域会非常广泛,可以容纳的公司也会非常之多。在当前阶段,我们选择适合我们的道路,先做个“送水工”,给大家提供小型开发平台,希望能让开发者充分参与进来,加快研发和迭代速度,希望机器人能更早的在生产和生活中为人类提供服务。
关于职业发展,10多年来面试过很多人,我发现大多数人对于新的发展方向和职业选择缺乏判断。我想说这是一个有意思的行业,有巨大的发展空间,整个世界都将为之改变,现在正处在发展早期,值得所有人加入。
我们也在招募优秀的人才。如果你对我们公司感兴趣,或者对这个行业感兴趣,或者职业发展有困惑,都可以来跟我聊聊。
END
关于高擎机电
以高性价比产品推动行业发展
我们旨在为行业创造新的可能











