机器人行业是未来最有发展潜力的行业之一,伴随着人工智能技术的进步,也为机器人行业带来了更加广阔的发展前景。而双足机器人作为机器人领域最具价值前景的分支,一直以来都存在包括技术、成本在内的许多有待突破的瓶颈。
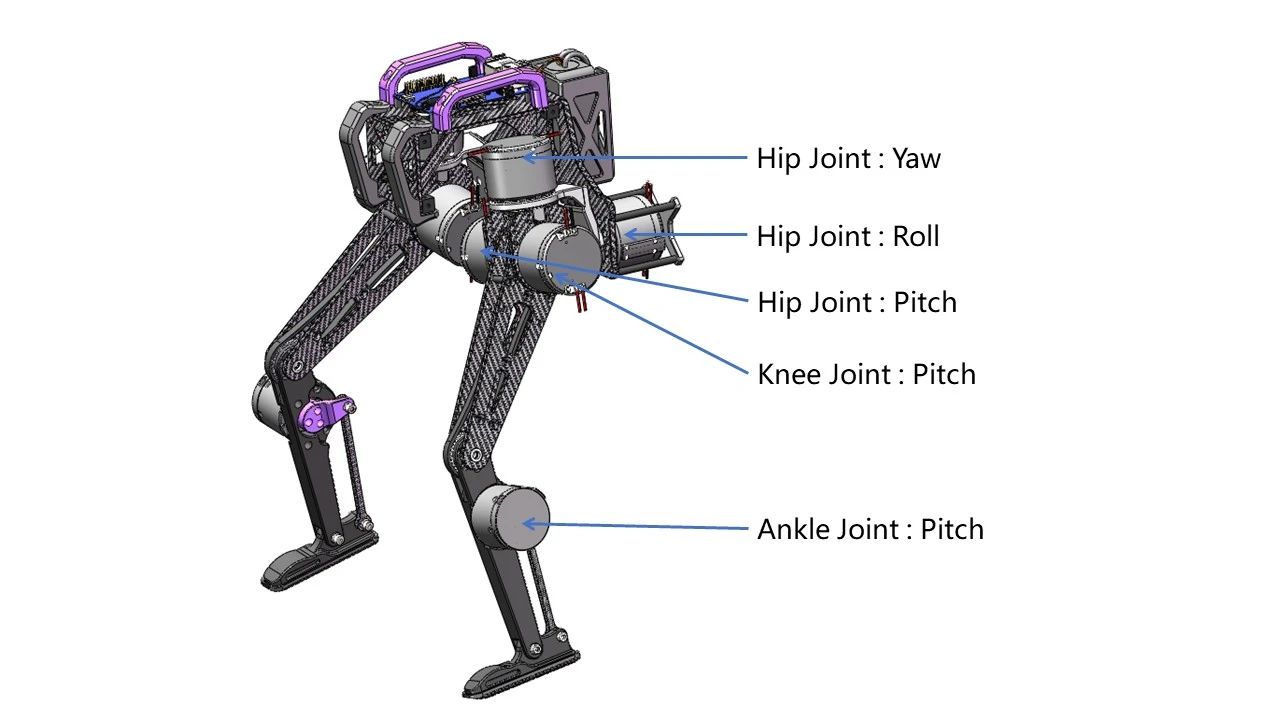
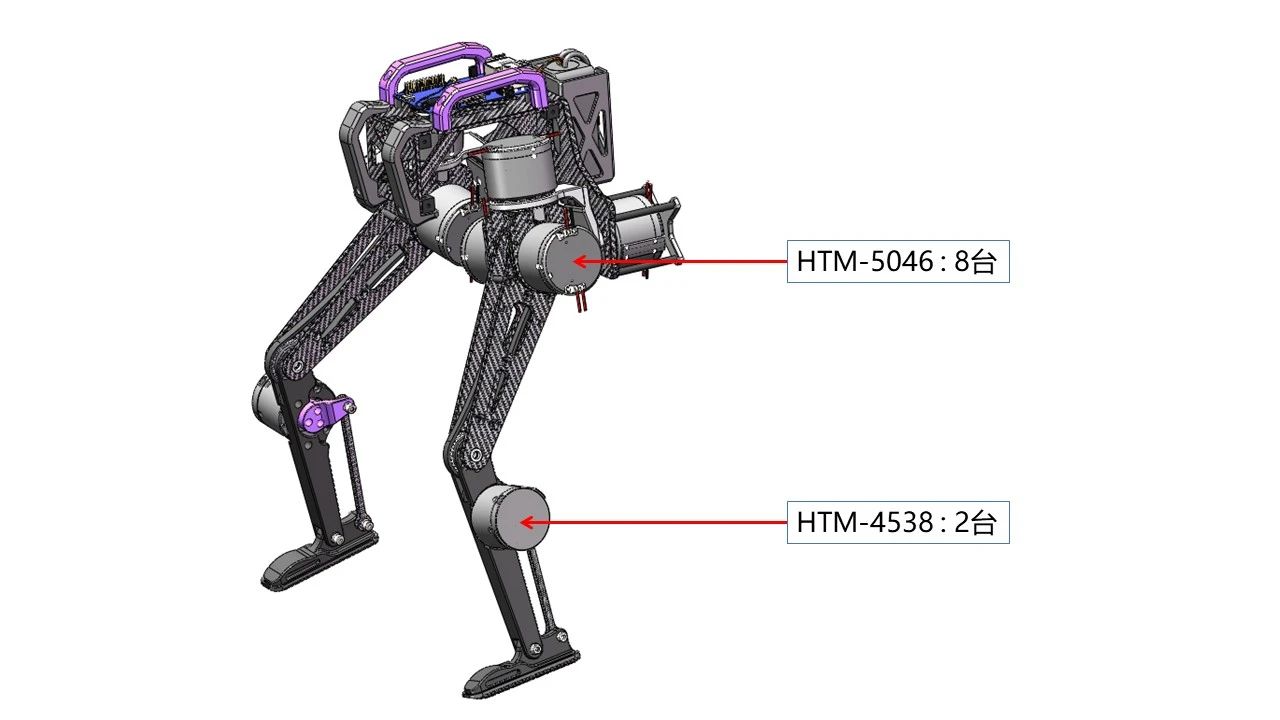
从技术上而言,双足机器人的腿部关节是最大的难点,包括关节结构设计、动力学建模等;从成本上而言,使用目前市面上主流的关节电机搭建起来的机身成本高,普通开发者难以负担。为了解决上述这些问题,我们专门做了一款小体积、高性能、价格还便宜的双足机器人——π。在设计双足机器人腿部关节的时候,我们依据了人的腿部关节结构,设计了单腿5自由度(其中髋关节3自由度+膝关节1自由度+踝关节1自由度),双腿共10自由度。为了降低研发成本,我们自主打造了HTM-5046这款小型关节模组,尺寸50mm*46mm,集成了无刷驱动和双编码器,额定扭矩2Nm,峰值扭矩8Nm,转速120RPM,重量280g。(目前这款关节模组已经量产销售,可复制口令购买:【淘宝】https://m.tb.cn/h.UBbYRHP?tk=lkfndJim7x3 CZ3457 淘宝搜索直接打开)为了进一步降低小腿的惯量,我们又专门设计了一款更小的模组——HTM-4538,尺寸只有45mm*38mm,同样集成了无刷驱动和双编码器,额定力矩1Nm,峰值5Nm,转速120RPM,重量仅为150g。

如此,整个双足机器人搭建起来,总共用了8台HTM-5046关节模组+2台HTM-4538关节模组。
得益于两款关节模组的精巧,这款双足机器人整机的质量仅有4kg,高度仅为45cm,是目前全球最小的一款高性能无刷双足机器人。为了让更多的开发者能够拥有自己的双足开发平台,我们预计将这款双足机器人开源,并且出售基础套件。同时,我们也期待有更多感兴趣的小伙伴同我们一起来完善这一开源项目。如果你对这款双足机器人项目或对其中使用的关节模组感兴趣,欢迎关注公众号“高擎机电”,后台私信回复关键词“双足机器人咨询”,即可获相关资料信息~另外,我们的HTM-5046关节模组已经正式对外量产销售,可复制口令购买:【淘宝】https://m.tb.cn/h.UBbYRHP?tk=lkfndJim7x3 CZ3457 淘宝搜索直接打开。