
Panthera-HT 项目的初心是让学生党能以更低的价格玩到更高性能的关节电机机械臂。
项目前身 Panthera 机械臂是一套基于 DM 执行器的六轴夹爪机械臂。初始概念由 wEch1ng(https://github.com/wEch1ng) 提出,wEch1ng 与伙伴 KelvinLauMiau
共同分担设计、实施、调试和硬件验证的责任,最终完成了 Panthera 机械臂的制作并开源。
后来项目原作者与高擎一拍即合,在高擎的支持下将项目完善落地并命名 Panthera-HT,做成了一个更加完善的创客产品。但我们始终坚持开源理念,不对项目作出任何限制。

依托运动控制算法与高精度传感能力,实现0.1mm重复定位精度,面对对位、抓取和连续轨迹执行时更稳更准。

轻量化6轴设计结合860mm超长臂展,带来更大的空间覆盖能力,让机械臂在复杂场景中依然能够灵活伸展、自由运动。

整体设计兼顾外观统一与结构稳定,铝合金机身集美观、强度与耐用性于一体,长期使用依然稳固可靠。

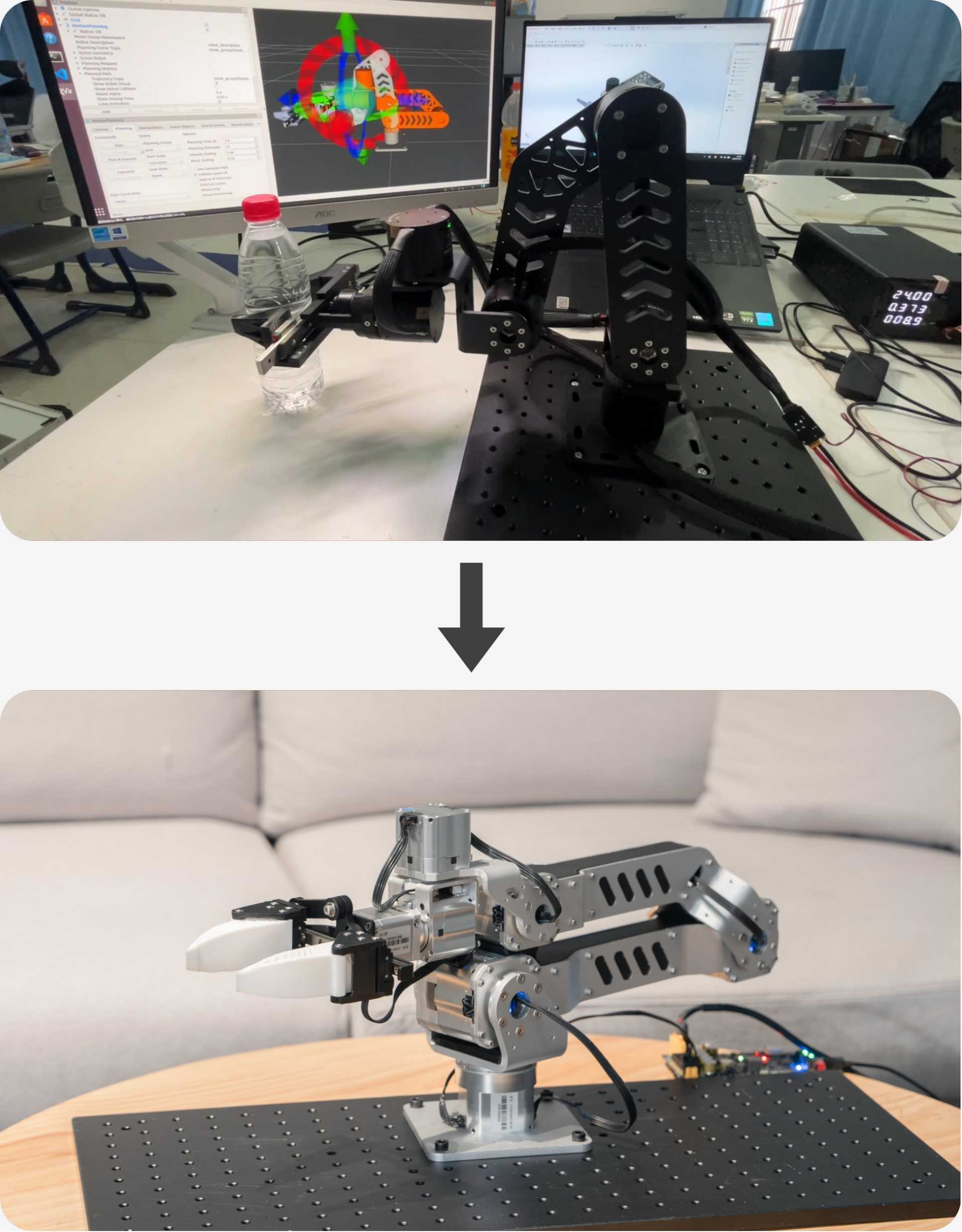
适配ROS2与Lerobot,支持C++、Python开发,并提供URDF模型与仿真支持,便于教学研究与二次开发快速落地。